It was the spring of 2020, and my family was getting tired of being cooped up in the house together during the pandemic. Our three kids were in the midst of their remote learning adventures at home and I had set up a workstation out in the garage. As the temperatures warmed from the cold winter, I was looking forward to getting out of the house and doing some gardening.
Every year, we plant a big garden with tomatoes, peppers, watermelon, cantaloupe, green beans, and, of course, lots of sweet corn. I was in the midst of planting my seventh or eighth row of corn (already with a sore back from bending over) when it dawned on me . . . why don’t I create a robot to do this job for me? So, I challenged myself to build and program a TETRIX® corn-planting robot to plant my sweet corn in 2021.
Creating CropBot
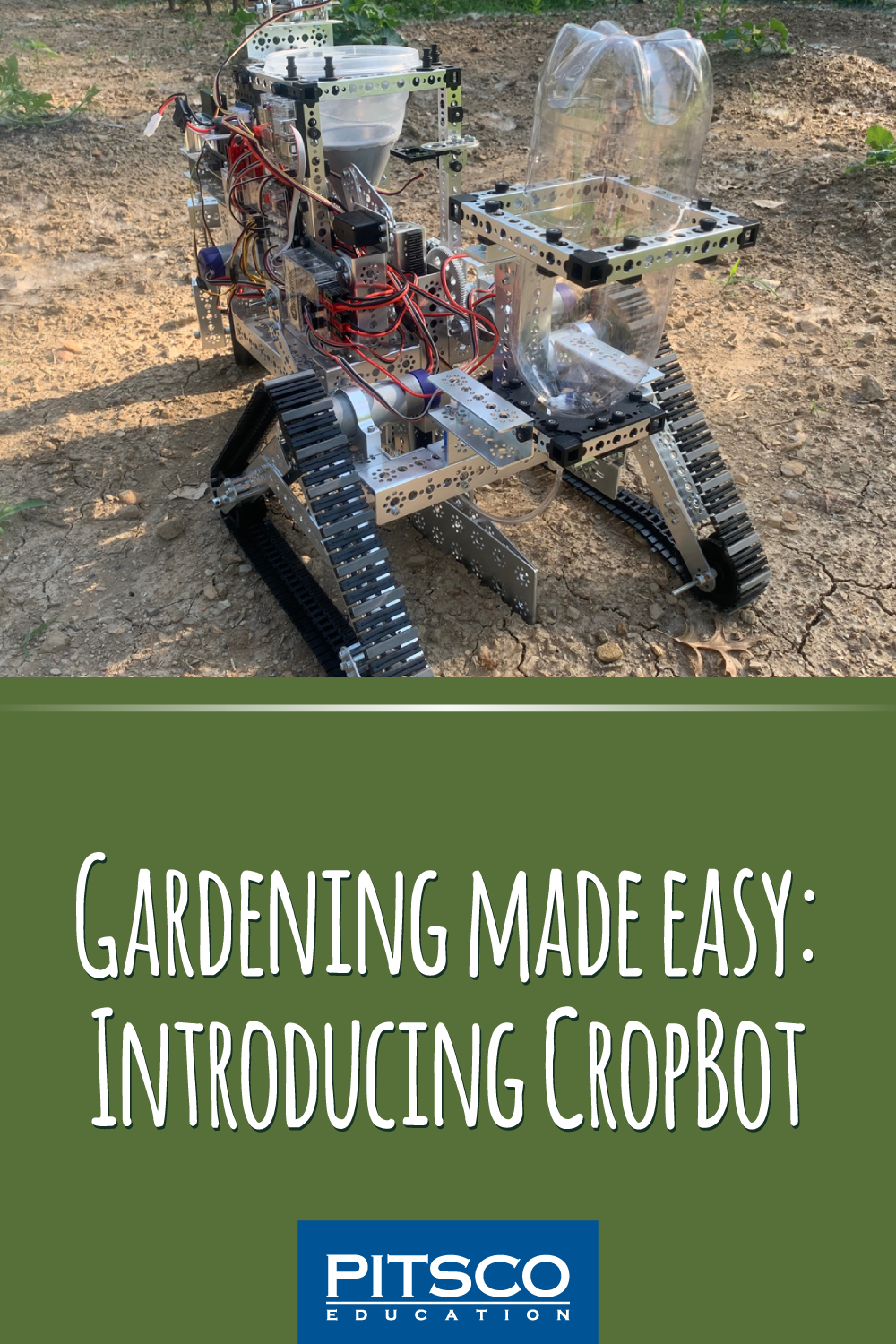
A year and several iterations through the engineering design process later, I want to introduce you to my robot with a corny name – CropBot. But, before I explain how CropBot works, I just want to mention one thing. The agriculture industry is quickly being inundated by robots. The farm of the future will be a high-tech automated system that produces more food using fewer resources for an ever-growing population. And, although CropBot is more of a concept robot than a full-on industrial planting robot, it proves a point – solutions to society’s problems and challenges can come from anywhere.
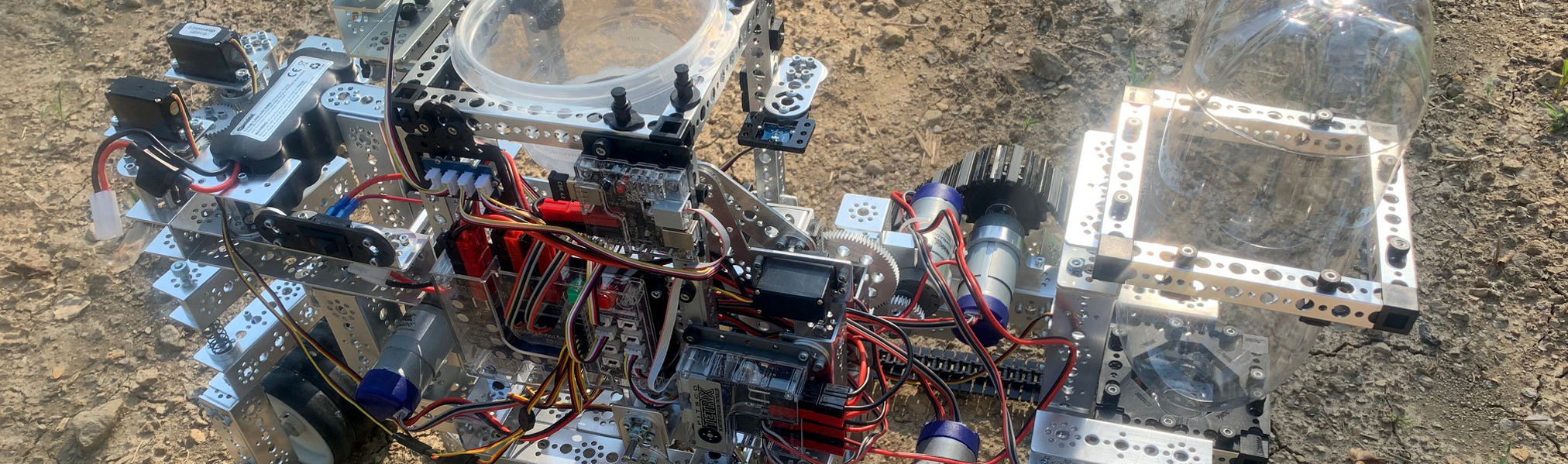
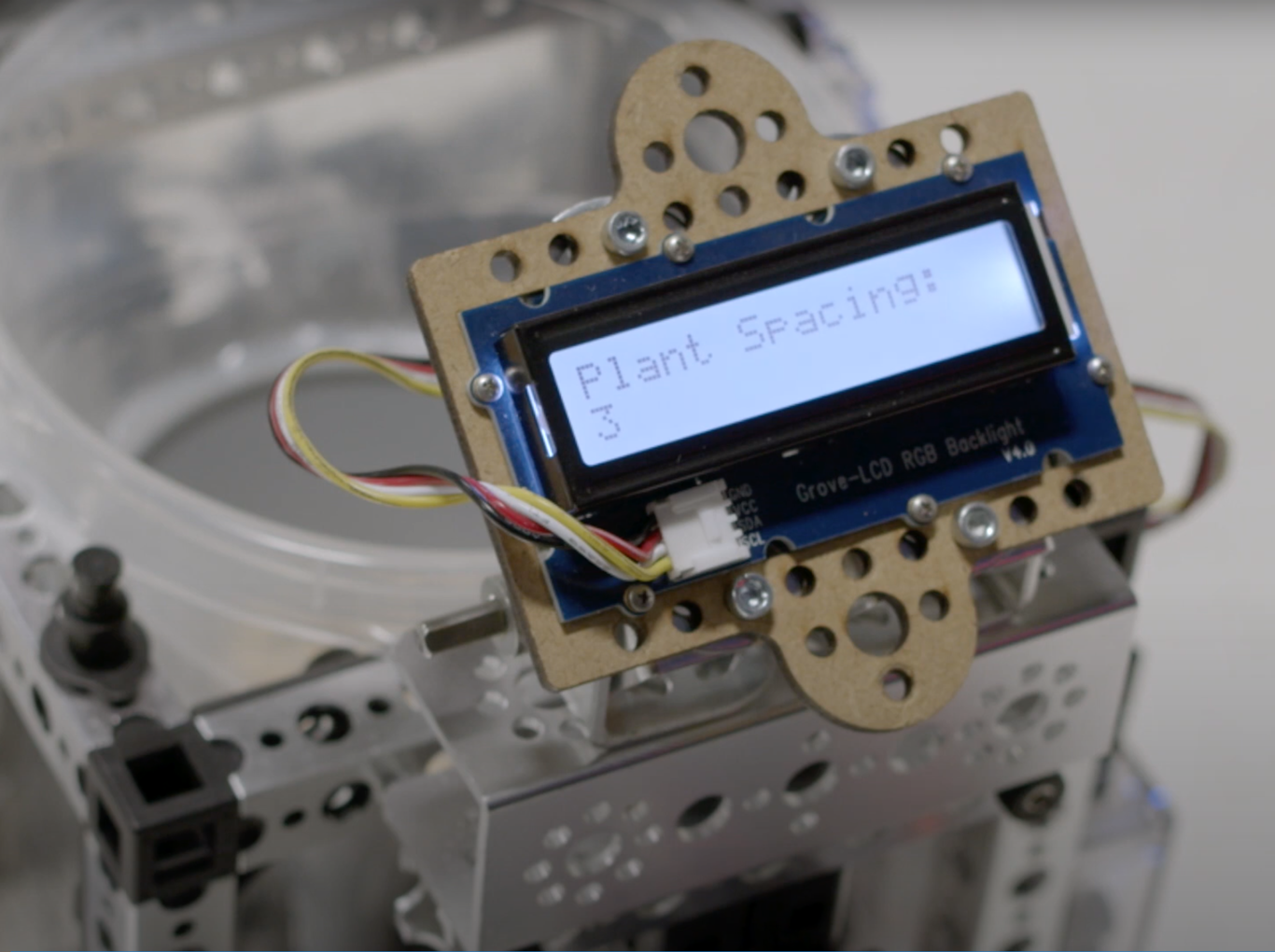
CropBot is a track-driven tele-op TETRIX robot that is controlled by a SONY PS4 DUALSHOCK 4 game controller. It has two modes for planting crops – manual and automatic. Included on the robot is an LCD screen used for adjusting the seed spacing, seed depth, amount of water to add to a seed, light sensitivity, and many more customizable settings. When these settings are input into the TETRIX PRIZM® controller using the PS4 game controller, the robot goes through some calibration before being ready to plant whatever seeds are loaded into its hopper.

CropBot plants seeds using a plow and a grader that are powered by two TorqueNADO® motors and are driven up and down using a rack-and-pinion gear system. Limit switches are used to zero out the TorqueNADO motor encoders. This allows PRIZM to calculate the distance the plow and grader need to extend into the soil to achieve the desired seed depth. The plow is a simple wedge that plunges into tilled soil creating a furrow for the seeds to be planted in. The grader at the back of the robot is what covers the seed with loose dirt.
Start Planting
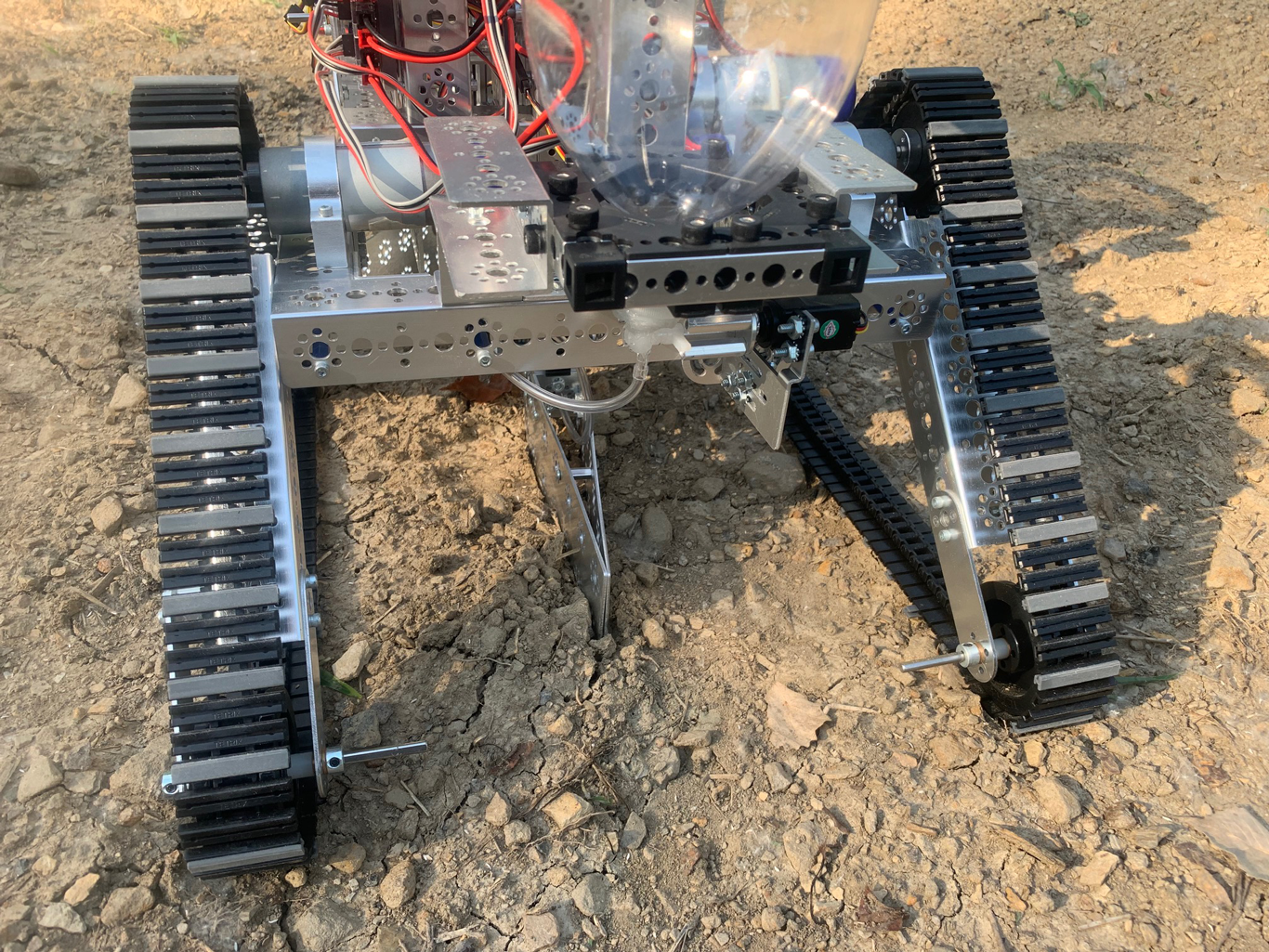
After CropBot is calibrated, you use the PS4 controller to drive it where you want to start planting a new row. The tank tracks are also driven by powerful TorqueNADO motors. When you are ready to start planting, you simply push a button on the PS4 controller. In automatic mode, CropBot will slowly move in a straight line, planting seeds until you stop the robot at the end of the row. In manual mode, you drive CropBot, and the controller vibrates, telling you it’s time to plant a seed by pressing a button.
Besides planting depth, seed spacing is also determined using the TorqueNADO motor encoders. Calculations based on the inputted seed spacing are completed by the PRIZM controller to determine exactly how far CropBot needs to move forward before it plants the next seed.
Seeds are planted using a light/color sensor. First, the sensor measures the ambient light. When it is time to plant a seed, an agitator inside the seed hopper rotates using a standard TETRIX servo. The agitator moves back and forth until a seed drops through a hole in the hopper and onto a platform in front of the light/color sensor. The sensor then detects the change in light intensity and color, which tells the PRIZM that a seed is ready to be planted. The agitator stops turning and the seed is dumped into the furrow made by the plow.
The next part of the process involves a moisture sensor. A linkage system converts the rotational motion of a standard servo into linear motion that pushes the probes of the moisture sensor into the soil. If the moisture sensor measures a value that is less than the threshold set by the user during setup (meaning the soil is too dry), then a standard servo is used to open a valve on the water reservoir at the front of the robot. Water flows through a tube to the seed until the designated moisture level is reached, at which point the valve closes and the moisture sensor is retracted from the soil.
As CropBot moves forward to plant the next seed, the grader fills in the furrow, covering the planted seeds with dirt. Finally, the compaction wheels at the back are on a suspension system that lightly firms the soil to prevent erosion. Watch a more in-depth look at CropBot and motor encoders in the following video!
CropBot has been a fun project because it required a high degree of systems thinking and several iterations through the engineering design process. Now that my sweet corn is planted, the only thing that remains to be known is if it will taste as good since I didn’t have to do all that back-breaking work. We’ll find out in about a month when it’s time to start harvesting. I guess I’ll have to build a harvesting robot next.
TOPICS: IDEAS & INSPIRATION, ROBOTICS, Science, Technology, Engineering, Coding, Activities, TETRIX Robotics, Hands-on Learning, innovate